Q. What kinds of space robots are there?

Robonaut 2, a humanoid robot designed to look like the upper half of the human body (Courtesy of NASA)
There are three types of space robots. They differ based on where they are used, their purpose, and so on.
Orbital robots are used on the Space Station and on satellites. Examples are robots that move like cranes, such as the Canadian-made SSRMS robotic arm (known as the Canadarm 2) on the ISS, and the JEMRMS robotic arm on Kibo.
Lunar and planetary exploration robots move around on the surface of a moon or planet. One is Curiosity, the Mars Exploration Rover now exploring Mars. Because it takes time for commands from Earth to reach such a robot, lunar and planetary exploration robots are built to function autonomously.
And then there are manned space activity support and replacement robots, which either help or replace astronauts in their work inside and outside space vehicles. These include REX-J, as well as NASA’s Robonaut 2, which was launched in 2011.
Q. Of these, which type is Japan particularly skilled at?
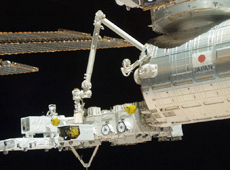
Kibo’s robotic arm (Courtesy of NASA)
Japan, along with Canada, leads the world in the realm of robotic arms for space. The robotic arm on Kibo has a main arm and small arm, and astronauts very much appreciate how easy it is to control. Prior to its development, a Manipulator Flight Demonstration was conducted in the Space Shuttle’s cargo bay in 1997. Then, in 1998-99, some colleagues and I tested a robotic arm installed on a satellite, Kiku No. 7 (also known as Engineering Test Satellite VII). That project involved two satellites – a chaser satellite called Hikoboshi and a target satellite called Orihime. These experiments were reflected in the design of Kibo’s robotic arm.
Orihime/Hikoboshi was also the world’s first unmanned-satellite rendezvous conducted both autonomously and remotely from the ground. It was a successful non-impact docking, so it got a lot of attention. And today, we are applying the results of that work to KOUNOTORI, the space station cargo ship now in service. This shows that Japan has a variety of space technologies to be proud of, beyond robotic arms.
Q. Do you think space robots will eventually replace astronauts?
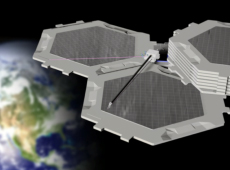
Artist’s rendition of REX-J building a solar power satellite
I don’t think so. There is a wide range of work to be done in space. Astronauts are good at sensitive work and making quick judgments, while robots are better at simple, time-consuming tasks, as well as assembly and maintenance of large space structures. More specifically, the work of robots includes such dangerous or mechanical tasks as:
• monitoring and controlling equipment used for experiments inside the ISS
• putting away tools used during EVAs and recording them with photos and such
• visual inspections of the outside of the ISS for traces of space debris impacts
• capturing damaged satellites and space debris
• construction and maintenance of, for example, moon bases and solar-power satellites
With robots, building a space hotel for tourists becomes a conceivable project in the future, for example. This is why I think it is important to think about each job in terms of what needs to be done – and can be done safely – by astronauts, and what should be left to robots. That way they can coexist effectively.
Q. Is the construction of a solar power satellite by REX-J already in sight?
Yes. It took about ten years to complete the ISS, which is roughly 100 meters wide in all directions. I think an SPS would be around 5 kilometers in diameter, but I think we could complete it in six months. If an SPS is 5,000 times as large (by volume) as the ISS, I believe it may be possible to build it with 1,000 robots. But the problem is how to operate 1,000 robots. Of course it would be too strenuous for one person to manage 1,000 of them, but I would like to make it so that five to ten people could do the job. That’s the new challenge.Q. What is interesting to you about building space robots?

The hardware for Earth and space robots is largely the same. The big difference is how to build space robots so they can withstand the vibrations during launch and the cosmic radiation in space. This applies not only to robots, but to all space equipment. The most important things are reliability, how to bring together proven technologies and techniques, and making systems that meet mission requirements. Plus, as an engineer, when I work on these kinds of projects I feel lucky that I get to think about simple solutions that no one else has thought of. But it can be quite hard to come up with new ideas if you don’t practice enough.
Q. What sort of practice does it require?
I think what’s key is to keep a stock of as many ideas as possible for things that may be useful sometime in the future. Ideas don’t come from thinking. They just come to you due to some little stimulus, often when you’re doing something else. If you maintain a stock of those flashes of insight as hints for future ideas, then one day they’ll come in handy.Q. Is there a dream space robot you’d like to build?

The High Power Dexterous Robotic Hand, currently under development
I want to build a space robot that an operator can move with one’s thoughts, without a separate set of instructions for each and every action. Robots that a person can move by thinking and without a physical connection already exist in labs on Earth, so in the future I think they’ll be in space, too.
Q. Is REX-J technology being used on Earth as well?
REX-J has a robotic hand that’s used to connect and disconnect hooks. It uses a simplified two-fingered version of the High Power Dexterous Robotic Hand, which was developed through joint research by JAXA and a private company. This hand was developed to be used both on Earth and in space with approximately the same dexterity and grip that an astronaut has during an EVA. If we can demonstrate this technology now with REX-J, then I expect we could commercialize it for a wide range of uses, such as industrial robots and nurse robots.Q. Please tell us about your aspirations for the future.
REX-J stands for “Robot Experiment on Japanese Experiment Module,” which means that it is an experimental robot to be used on Kibo, the JEM. But the word “rex” also means “king.” It may be a bit brazen, but we gave it this name in the hopes that it would become the king of space robots. After successful demonstration testing with REX-J, I hope to follow up with REX-J2 and REX-J3, and finally commercialize it. I hope it will then become the world’s leading space robot, as its name implies.
Mitsushige Oda
Professor of Mechanical and Aerospace Engineering, Graduate School of Science and Engineering, Tokyo Institute of Technology
Principal Investigator, REX-J Experiment
Adjunct Committee Member, Robotics Research Group, Aerospace Research and Development Directorate, JAXA
Prof. Oda earned a Master’s degree in Control Engineering from the Tokyo Institute of Technology’s Graduate School of Mechanical and Control Engineering in 1977. Subsequently, he joined the National Space Development Agency of Japan (NASDA, now JAXA), where he worked on satellite attitude control engineering and space robot engineering. In 1997, he remotely controlled from Earth a robotic arm installed on a test satellite, Kiku No. 7 (ETS-VII). In 2003, he became the engineering leader of the Robotics Research Group at the Innovative Technology Research Center. Prof. Oda joined the faculty of the Mechanical and Aerospace Engineering department at the Tokyo Institute of Technology’s Graduate School of Science and Engineering in 2012. His area of expertise is space robot engineering.