
Q. What sort of space robot is REX-J?

Equipment sent to the ISS for the REX-J Robot Experiment
REX-J (Robot Experiment on ISS/JEM) is a kind of “astronaut support or replacement robot.” It provides support during spacewalks, which are known in the trade as extravehicular activity, or EVA. It can also take over certain tasks from the astronaut.
There are a number of laboratory modules on the International Space Station: the Zarya Functional Cargo Block (FCB), the Zvezda Russian Research module, the Pirs docking module, the Destiny U.S. research module, the MRM-2 Mini Research module, the Harmony U.S. station node, Japan’s Kibo lab, and ESA’s Columbus module. At any given time on the ISS, there are between three and six crew members. But they are supposed to work eight hours a day, with two days off a week. That’s not a lot of time for all the work they have to do, such as testing and repairing equipment. In addition, before doing a spacewalk, they need around 4.5 hours of decompression to get their bodies accustomed to the low pressure – 0.3 atmospheres – inside the space suit, and a similar amount of time at the end to get back to the normal air pressure inside the ISS. Furthermore, each EVA poses life-threatening risks, such as cosmic radiation and impacts from space debris. Therefore, there are tight restrictions on how long an astronaut can be out of the space station, and how many EVAs an individual can perform. This really limits how much EVA work is possible. REX-J supports astronauts on their EVAs, and substitutes for them when possible, to reduce these kinds of problems.
Q. What is the purpose of the tests now being conducted with REX-J in orbit?
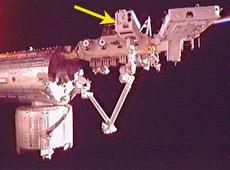
The Multi-mission Consolidated Equipment (MCE) module installed on Kibo’s Exposed Facility. (Courtesy of JAXA/NASA) 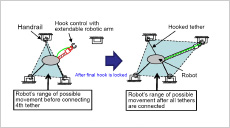
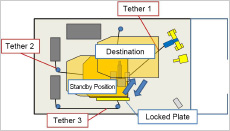
Principles of Robot Movement via Tethers
![]()
Tethers are attached to handrails with hooks. 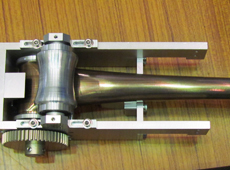
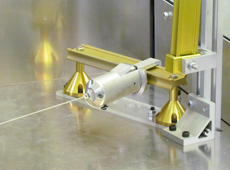
Robotic arm with a tape-measure-like structure
Until now, space robots developed for practical use have had very limited functions. But sooner or later the amount of work performed in space will grow, and so we will need robots that can do the same things an astronaut does, or even more. We will need new technologies to make such robots a reality, and REX-J is testing some of these technologies to see if they are useful.
Space robots that can perform the work of astronauts will need to have some key functions that are similar to humans: 1) “relocation”, which is equivalent to a human’s legs, 2) situational observation and “judgment,” which would be equivalent to the eyes and brain, and 3) the “hands” that actually perform the work. The robot’s shape and the way it moves will differ depending on how you implement these functions. With REX-J, we are aiming to develop “space re-location functions.” We’re testing REX-J inside a box known as the Multi-mission Consolidated Equipment (MCE) module on the Exposed Facility of Kibo, the Japanese Experiment Module.
Q. How does REX-J move? Also, please tell us about the testing in more detail.
The REX-J robot is suspended on tethers, and moves by adjusting their length. For example, when it moves forward, it pulls the front tether and lets out the rear one. One end of each tether is attached to the robot; the other end has a hook that locks onto the handrails on the walls of the ISS. To reposition the robot and adjust its range of movement, you simply connect the tether to a different handrail.
The hooks are controlled using the REX-J’s extendable robotic arm. REX-J’s robotic arm has a unique design – it works like a tape measure, with a robotic hand on its end. This extendable robotic arm can be up to several dozen meters long, while remaining very compact in its stored position.
REX-J is designed to demonstrate robotic functions that apply only in the zero-gravity environment of space. It was sent up on KOUNOTORI 3, the space station cargo ship launched on July 21, 2012. Full testing began in mid-October, after its basic movements were verified. Over a six-month period, we are testing the robot’s extendable arm, and its movement using the tethers. One thing REX-J will have to be able to do is move without swaying. At the end of the process, we will extend the robotic arm through a window on the side of the MCE, to observe the ISS and test REX-J’s movement in the absolute-zero temperature of space.
Link: Testing a new robot on the ISS (REX-J introductory video, Japanese only)
Q. What kinds of results have the tests produced so far?
Movement Mechanism through Tether Control
![]()
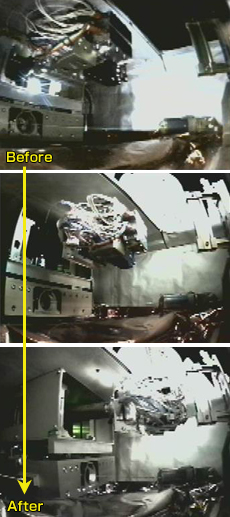
Visual: Robot Movement through Tether Control
REX-J tests are performed by remote control from the ground-based operations control room. Our first step was to release the launch lock mechanism, which fastens REX-J’s movable parts, such as the extendable robotic arm. Then, we extended and retracted the robotic arm. Then, we grasped the hook at the end of the tether, pulled out the tether, and finally attached the tether hook to a handrail. Now that we have accomplished this, REX-J can move around.
Link: REX-J Test Report (Japanese only)
Q. Where did the idea for using an extendable robotic arm and tethers come from?
It just came to me. My pet theory is that even a dry cloth will yield water if you squeeze it hard enough. If you think this is impossible, then think of this analogy: if you leave a dry cloth on a window sill or in the yard overnight, you’re sure to find water in the cloth in the next morning. (Laughs)
Before REX-J, I was involved in R&D for a solar power satellite (SPS). Since an SPS would be quite a large structure, it would need to be assembled by robots. One of the tasks the robots would have to perform would be to pick up parts and deliver them to an assembly location. Then, other robots would take these parts and assemble the satellite.
The extendable robotic arm’s extension mechanism is derived from technology developed some 40 years ago, for communication antennae on small satellites. What’s new and unique is the idea to adapt this mechanism to a robotic arm.
An extendable antenna uses a shape-memory alloy and the force of a spring to wind it up for storage, like a tape measure. After a satellite arrives in orbit and the antenna is unlocked, the antenna uncurls into a cylindrical shape almost instantly. But conventional antennae cannot return to the shape they’re stored in after they’re extended. We added a motor to this mechanism so that REX-J’s arm can extend and retract.
So in fact, I’m not doing something entirely new. I’ve just made a small modification to existing technology. Because I’ve combined things we already have rather than trying entirely new technologies, the project is fairly assured of success. It would be great if this gave birth to a whole new approach to space robotics.