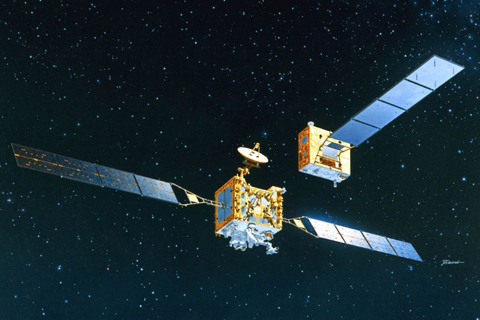
The KIKU-7 conducts the rendezvous-docking and space robotics experiments. In the rendezvous-docking experiment, the chaser satellite conducts rendezvous-docking with the target satellite by both automatic and remotely piloted controls, and in the space robotics experiments, unmanned space work is carried out by teleoperation. In addition, the space robotics experiments by MITI / ETL, CRL and NAL are carried out. The operation of the ETS-VII is conducted from the ground via data relay satellite (TDRS). These experiments on the KIKU-7 are the first attempt in the world and enable us to establish the basic technology for future space activities.
The operation of the rendez-vous-docking and space robotics experiments are conducted from the NASDA ground stations via data relay satellite (TDRS).