The JAXA Space Exploration Innovation Hub Center Co-Produces Results on
Remote and Automatic Control to Build Lunar Base
March 28, 2019 (JST)
National Research and Development Agency
Japan Aerospace Exploration Agency
Kajima Corporation
National Research and Development Agency Japan Aerospace Exploration Agency (President: Hiroshi Yamakawa, hereafter JAXA) and Kajima Corporation (President and Representative Director: Yoshikazu Oshimi) have promoted research and development on the remote construction system by coordination of remote and automatic control. * The project got started in 2016 with the participation of schools; Shibaura Institute of Technology, The University of Electro-Communications and Kyoto University. With application in view to remotely controlled construction of a lunar base, the experiment conducted at the Kajima Seisho Experiment Site, Odawara, Kanagawa, of two kinds of the automated construction functionality has produced some results.
*Remote construction system by coordination of remote and automatic control: A joint research theme of the JAXA Space Exploration Innovation Hub Center
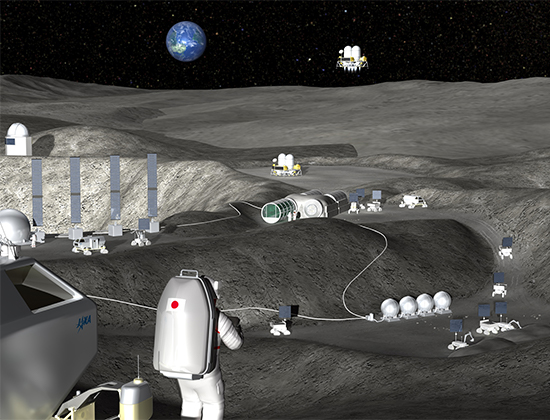
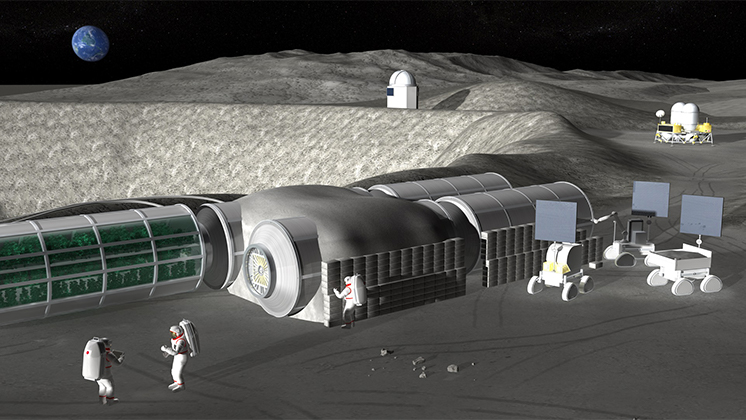
Computer generated images of remotely operated construction of lunar base
【Research Background】
Remote control is a feasible method to build a human base off of Earth, on the moon and Mars in the future. Compensation of the considerable delay caused by sending any command to construction machinery from Earth has been an issue, however, along with others such as productivity and efficiency. On Earth, too, the same technologies are in need to deal with a predicted shortage of adept human resources in the construction industry, which has conventionally been human labor oriented. Since 2015, A4CSEL, developed by Kajima Corporation to automate construction machinery has been on site. The research took off by the parties of five – JAXA, Kajima Corporation and three schools as technologies of A4CSEL can be used to realize the remote construction functionality in space by coordination of remote and automatic control.
【Research Overview】
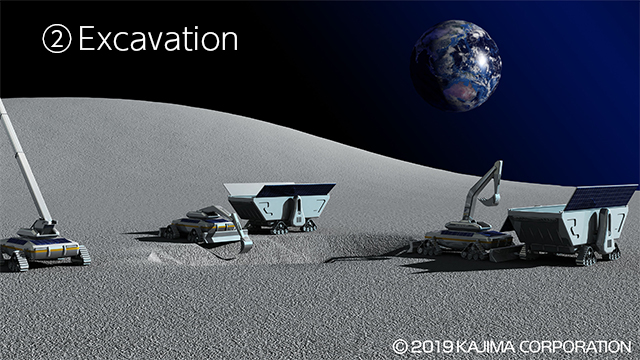
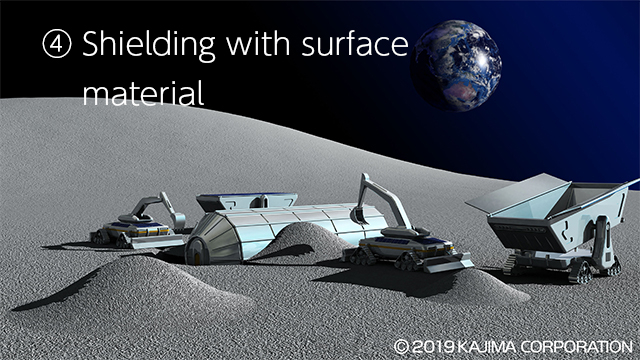
Remote, autonomous control to build a human lunar base will require the following steps;
| ① | Site preparation work for the module for human habitation |
|---|---|
| ② | Excavation that meets the required depth |
| ③ | Installation of the module |
| ④ | Shielding the module with the surface material to protect it from meteoroids and radiation |


Remote Construction of Manned Lunar Base
A seven-ton class earth mover has been modified with onboard survey instruments and an automatic operation control console. The instruments that the tractor and backhoe are installed with autonomously measure the position and direction of its own, making it both remotely and automatically operable.
In addition to full automation, this research is designed to acquire the following to establish remote construction functionality by coordination of remote and automatic control;
- Operational support to compensate for delays: remote control functionality that could compensate for considerable communication delays for 3 to 8 seconds without undermining the operation and stability of the remotely controlled machinery
- Motion recognition that adapts to environment: autonomous operation that opts for plausible solution in variable space topography due to communication delays
- Coordination of multiple construction machines: interference avoidance that facilitates synchronization of several operations
Various commands have been executed – the routine operation is repeated, driving over specified distances is automated, and operations requiring fine tuning are controlled remotely. The operational process has shown feasibility of the unmanned technologies to build a lunar base.


Autonomously operated tractor and backhoe
【Future Directions for Research】
Research and development continues to advance the obtained results and to improve the functions and performance of the system. Practical technologies are to be sought for to estimate position on the Moon and Mars where Global Navigation Satellite System (GNSS) is unavailable, and to precisely recognize and navigate terrains, and to ensure the system stability in the uncertain cosmic communication environment.
This ongoing joint research has been carried out as part of the Japan Science and Technology Agency Support program to start up an innovation hub center.