Outcome for the Smart Lander for Investigating Moon (SLIM) 's Moon Landing
January 25, 2024 (JST)
Japan Aerospace Exploration Agency
The Japan Aerospace Exploration Agency (JAXA) Smart Lander for Investigating Moon (SLIM) landed on the lunar surface on January 20, 2024 at 0:20 am JST, and communication was established with the Earth.
However, due to the spacecraft not being at the planned attitude upon landing, power generation was not possible from the solar cells, and the spacecraft was shutdown with a command from the ground at 2:57 am JST.
Analysis of the data acquired before shutting down the power confirmed that SLIM had reached the Moon’s surface approximately 55m east of the original target landing site. The positional accuracy before the commencement of the obstacle avoidance maneuver (at around a 50m altitude) which indicates the pinpoint landing performance, was evaluated to be at approximately 10m or less, possibly about 3 - 4m. While more detailed evaluation continues, it is reasonable to mention that the technology demonstration of pinpoint landing within an accuracy of 100m, which has been declared to be the main mission of SLIM, has been achieved.
All technical data on the navigation guidance leading to the landing, and navigation camera image data captured during the descent and on the lunar surface that is necessary for future pinpoint landing technology, was obtained from the spacecraft. The small probes (LEV-1 and LEV-2) were successfully separated just prior to landing in this contingency situation. The multi-band spectroscopic camera (MBC) onboard SLIM was also operated on a trial basis and captured images until the power was turned off.
Regarding the circumstances of how SLIM became stationary on the lunar surface at an attitude that could not generate power from the solar cells, the acquired technical data revealed that at an altitude of 50m just prior to the start of the obstacle avoidance maneuver, the thrust from one of the two main engines was most likely lost. Under these circumstances, the SLIM onboard software autonomously identifies the anomaly, and while controlling the horizontal position as much as possible, SLIM continued the descent with the other engine and moved gradually towards the east. The descent velocity at the time of contact with the ground was approximately 1.4 m/s or less, which was below the design range., but conditions such as the lateral velocity and attitude were outside the design range, and this is thought to have resulted in a different attitude than planned. The cause of the loss of the main engine functionality is now being investigated, including consideration of external factors aside from the engine itself, with the plan to determine the detailed cause. We will provide further information as the investigation progresses.
Regarding future activities, further analysis of the acquired technical and scientific data, as well as analysis of the cause of the anomalies that occurred, will proceed. Analysis of the data has shown that SLIM’s solar cells are currently facing west, suggesting that there is the possibility for power generation and thus recovery of SLIM as the sunlight illumination condition improves with time. Although SLIM’s activities on the Moon were originally expected to last only a few days, the necessary preparations for recovery will continue in order to acquire further technical and scientific data.
We will continue to keep you updated on the status of the project.
■ Image of the lunar surface captured by the SLIM onboard navigation camera after landing (credit: JAXA)

Note: the image is rotated to align with the direction of gravity.
■ Estimation of SLIM’s current location and the target landing site (credit: Chandrayaan-2:ISRO/SLIM:JAXA)
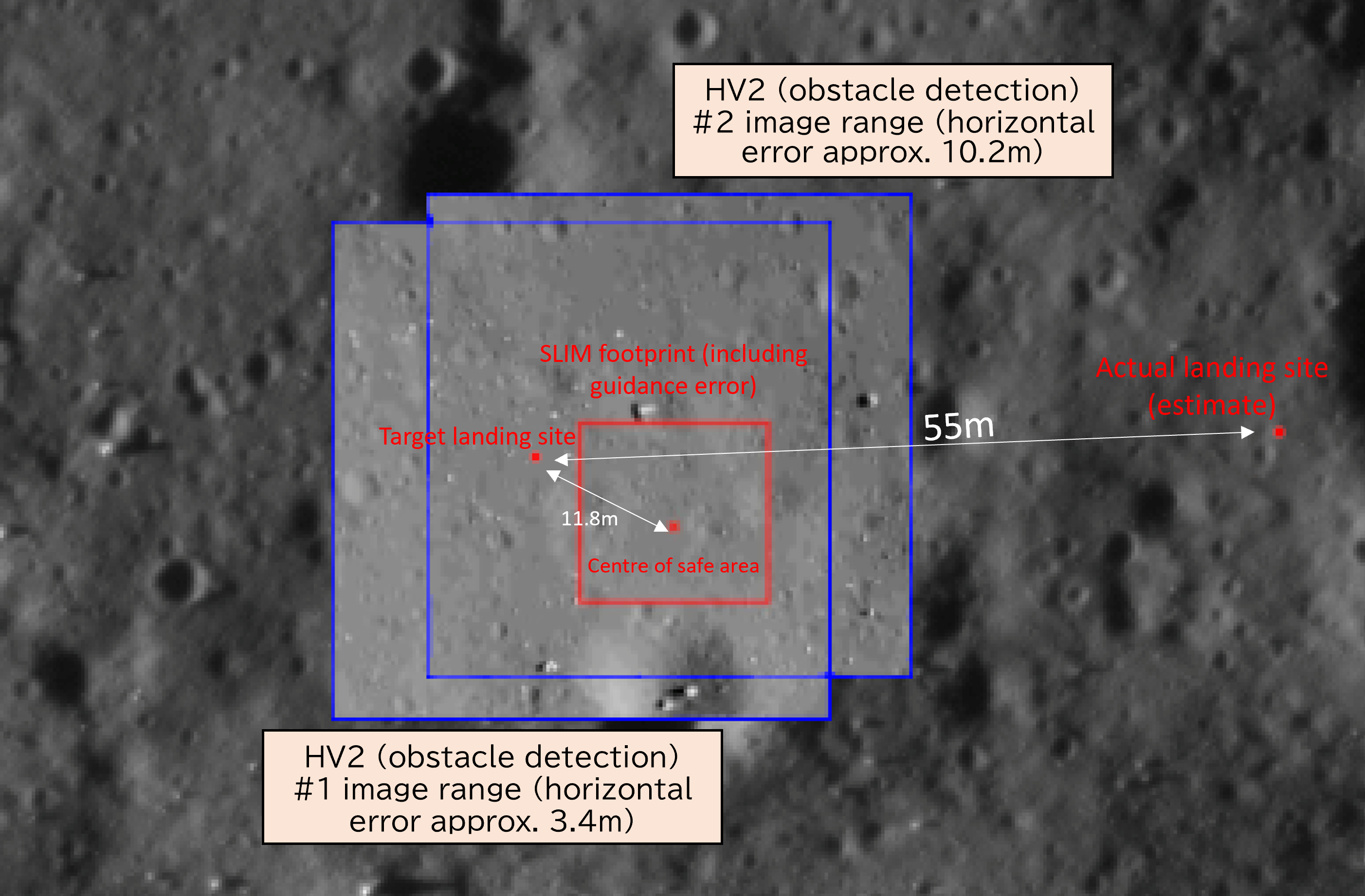
Note: Lunar topography captured by the Indian spacecraft Chandrayaan-2, overlaid with images acquired by the SLIM navigation camera during the HV2 (second hovering) at an altitude of about 50m. The two blue frames are images acquired during the obstacle detection at HV2. As the spacecraft subsequently enters the obstacle avoidance operation, the performance of the pinpoint landing is evaluated based on the positional accuracy at this point. The positional accuracy at the time of the first and second obstacle detection was respectively about 3 - 4m and 10m. Note that it is highly likely that the main engine was already affected by the loss of function when the second obstacle detection occurred. The SLIM footprint in the red frame is the safe landing zone set autonomously by SLIM based on the obstacle detection during HV2.